My vision is to build a close-loop emboided system—one in which machines continuously sense, interpret, generate, and refine their interactions with the physical world. To make such a closed-loop system possible, my research is driven by two tightly coupled questions: (1) How can machines perceive and reason about physical intelligence from real-world sensory interaction in an accurate and imperceptible way? (2) How can such physically grounded intelligence be further used to autonomously design and evolve embodied systems, including mechanical devices and robots?
I had my bachelor’s degree in Xiamen University. I am fortunate to work with Prof. Shihui Guo and Prof. Yipeng Qin for four years. Previously, I was a research intern at Carnegie Mellon University in the Computer Science Department and a visiting scholar at UC Berkeley in the Mechanical Engineering Department, mentored by Prof. Lining Yao and University of Washington, mentored by Prof. Yiyue Luo. I am now working at CSAIL, MIT, mentored by Prof. Wojciech Matusik.
If you are interested in any aspect of me, I am always open to discussions and collaborations. Feel free to reach out to me at jiaweif[at]stu.xmu.edu.cn
Research Experience
Massachusetts Institute of Technology CDFG, CSAIL (2025.5 – present) Research Assistant | Advisor: Prof. Wojciech Matusik
University of Washington, Seattle Wearable Intelligence Lab, ECE (2024.7 – 2024.9) Research Intern | Advisor: Prof. Yiyue Luo
University of California, Berkeley Morphing Matter Lab, ME (2024.1 – 2025.5) Visiting Scholar | Advisor: Prof. Lining Yao
Carnegie Mellon University Morphing Matter Lab, HCII (2023.4 – 2024.5) Research Intern | Advisor: Prof. Lining Yao
Project1: Acquiring Physical Intelligence Through Imperceptible Wearable Sensing
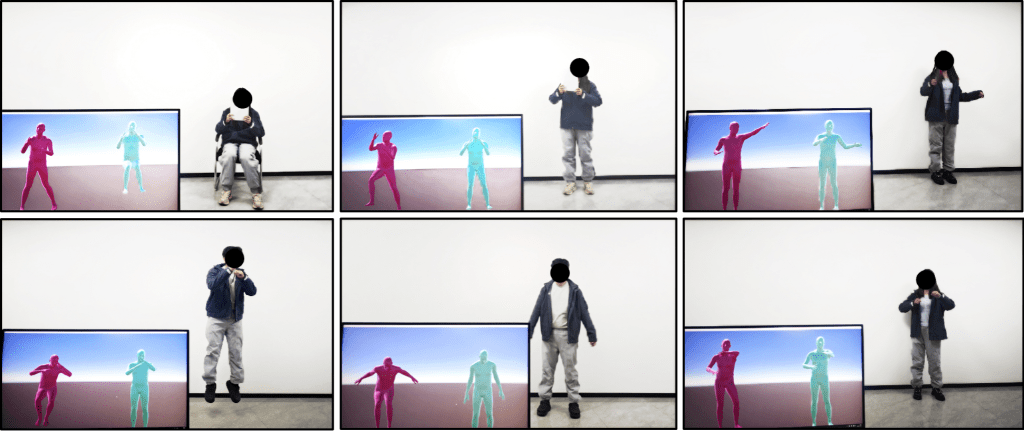
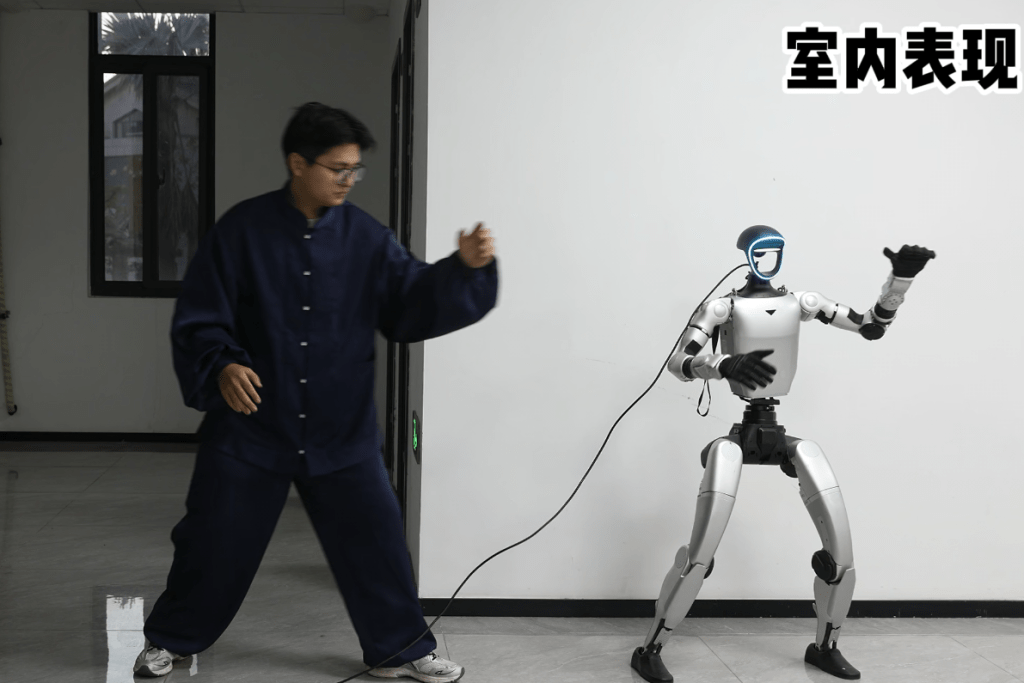
FUNGI: A Foundation Model for Generalist Garment-based Inertial Motion Capture How to learn a universal foundation model which could adapt to different users, motions, and garment designs? Current models generalize poorly across different fabric types, IMU placements, and sensor counts, leaving a significant accuracy gap compared to tight-fitting garments. Consequently, every new clothing…
the first LLM-driven framework that integrates morphology and reward shaping for co-optimization within the robot design loop
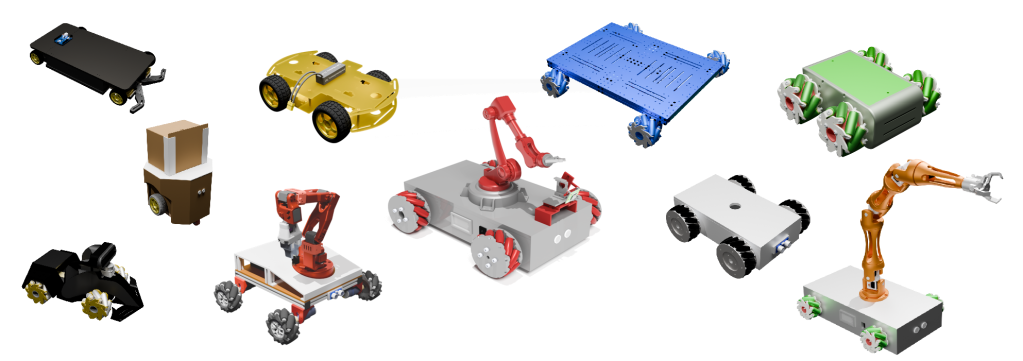
MobileCopilot
MobileCopilot: A Domain-Specific Language Framework for LLM-Assisted Mobile Robot Development
Jiawei Fang, Benjamin Jones, Minghao Guo, Zizhao Tong, Yunsheng Tian, Frank Zhiyang Dou, Wojciech Matusik (Under review of ICRA’ 25)
Mobile robots play an increasingly central role in robotics research and real-world deployment, spanning logistics, healthcare, service, and field exploration.
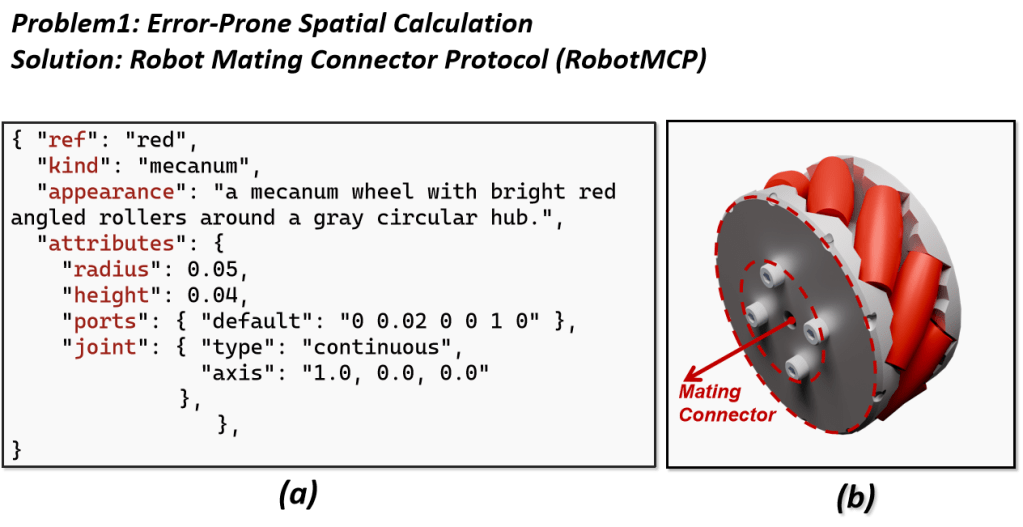
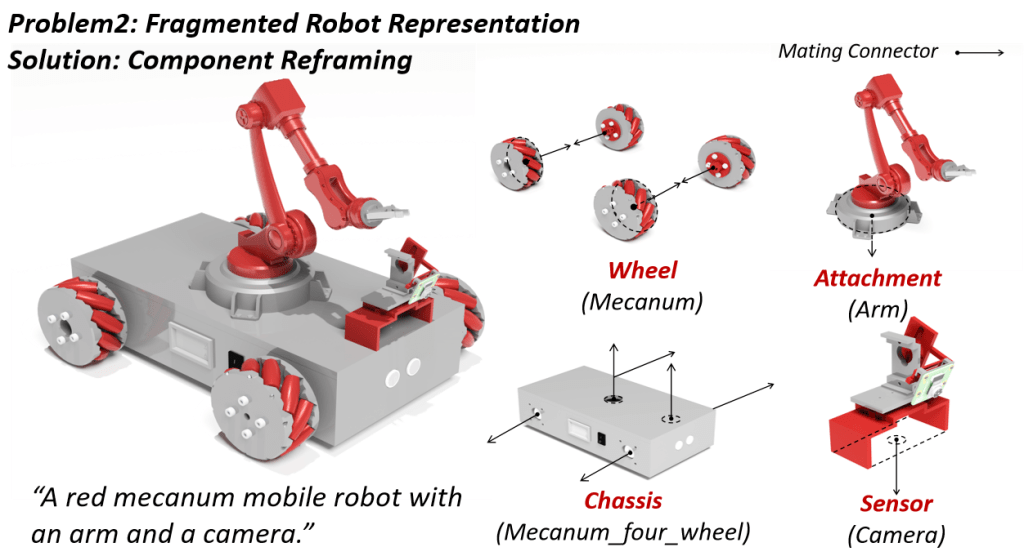
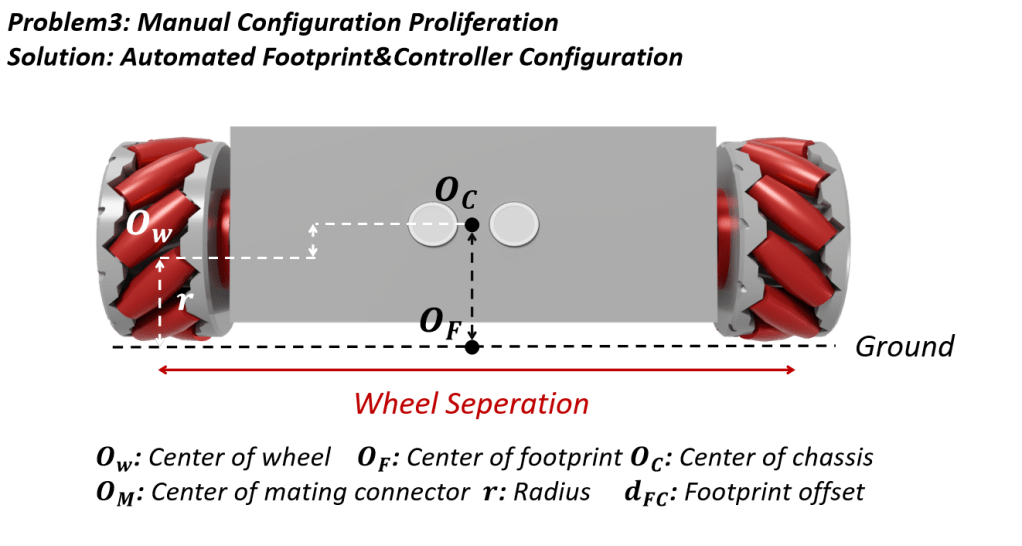
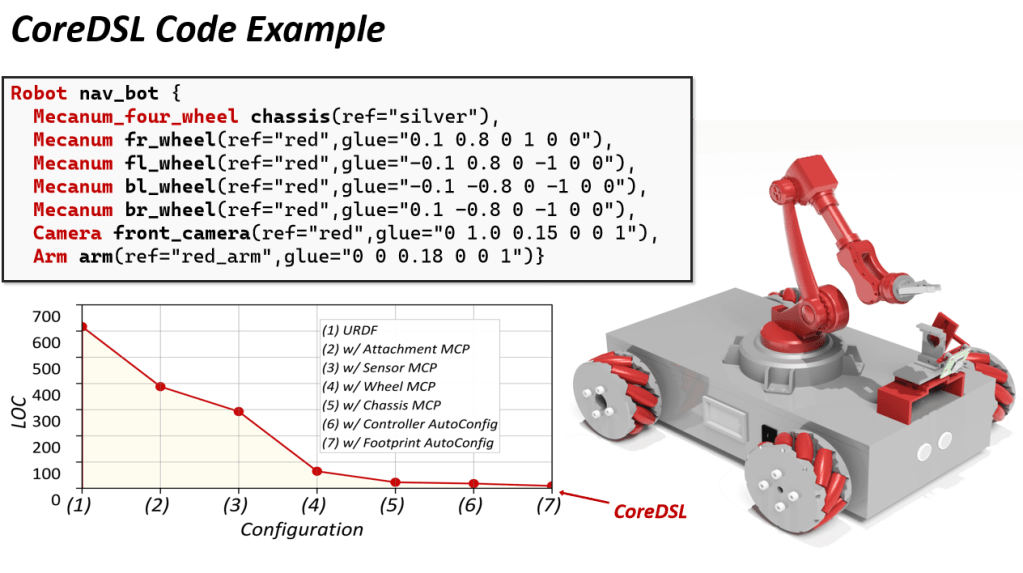
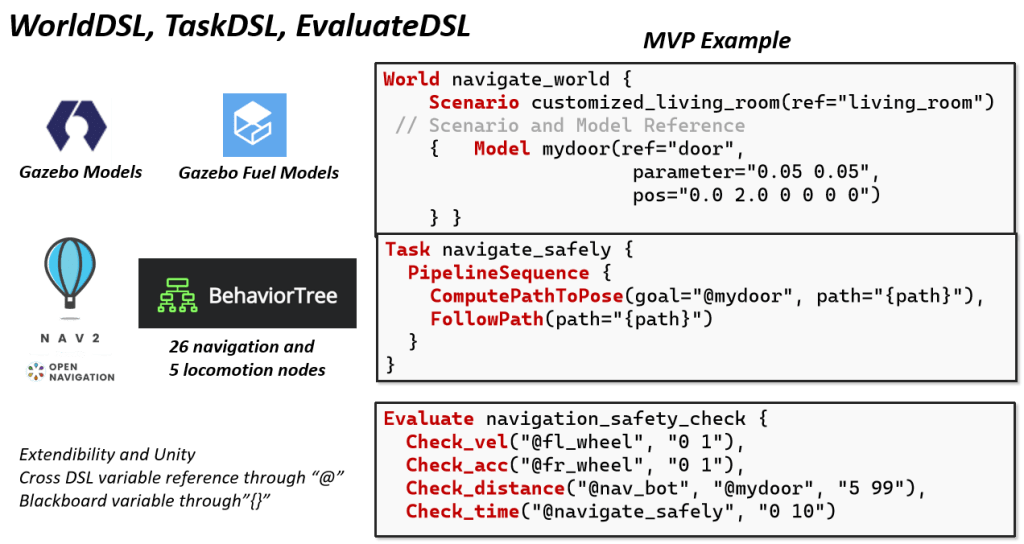
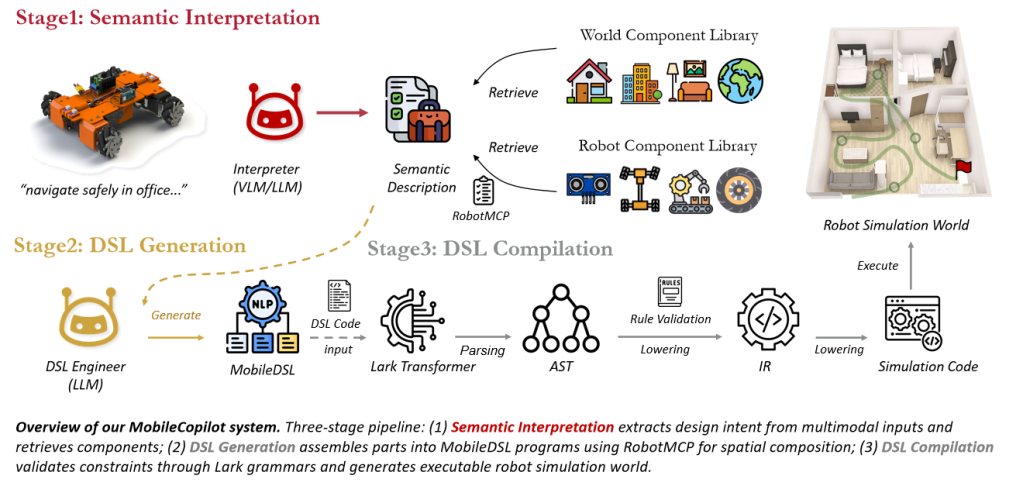
To solve problem1, CoreDSL introduces the Robot Mating Connection Protocol. instead of manual coordinate calculation, components connect through typed mating ports to alleviate complex spatial calculation.For problem2, CoreDSL introduces Component Reframing — a taxonomy that organizes robots into four categories: wheels, chassis, sensors, and attachments. This hierarchy cuts ambiguity and speeds setup, since choosing a subtype also links to the right controller while keeping parameters flexible.CoreDSL tackles Problem 3: Manual Configuration with Automated Configuration. It infers both the footprint and controller from RobotMCP connectors, unifying ground-contact geometry with kinematic models like wheel order, wheelbase, and radius — so robots can be modeled without manual setup.Our CoreDSL creates the robot with only 8 lines of code, whereas the equivalent URDF description requires nearly 600 lines, which demonstrates the effectiveness of our DSL.We introduce three more DSLs for end-to-end development: 1) WorldDSL builds environments, 2) TaskDSL encodes behaviors with behavior trees, and 3) EvaluateDSL tests physics and task performance.Based on MobileDSL, the MobileCopilot system follows a three-stage pipeline: (1) Semantic Interpretation extracts design intent from multimodal inputs and retrieves components; (2) DSL Generation assembles them into MobileDSL programs using RobotMCP for spatial composition; (3) DSL Compilation checks constraints with Lark grammars and produces an executable robot simulation world.








Leave a comment