
FIP: Endowing Robust Motion Capture on Daily Garment by Fusing Flex and Inertial Sensors
Jiawei Fang*, Ruonan Zheng*, Yuan Yao, Xiaoxia Gao, Chengxu Zuo, Shihui Guo, Yiyue Luo.
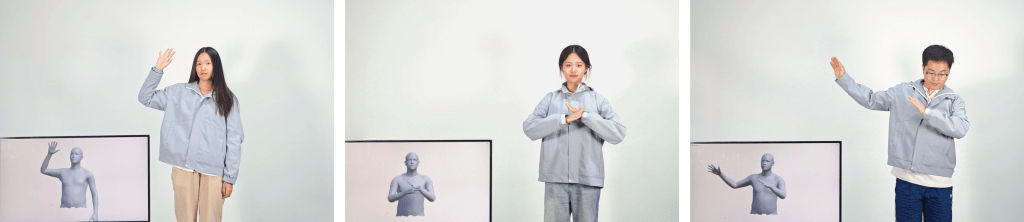
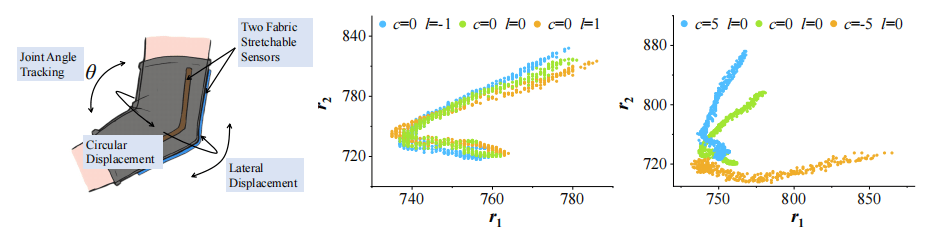
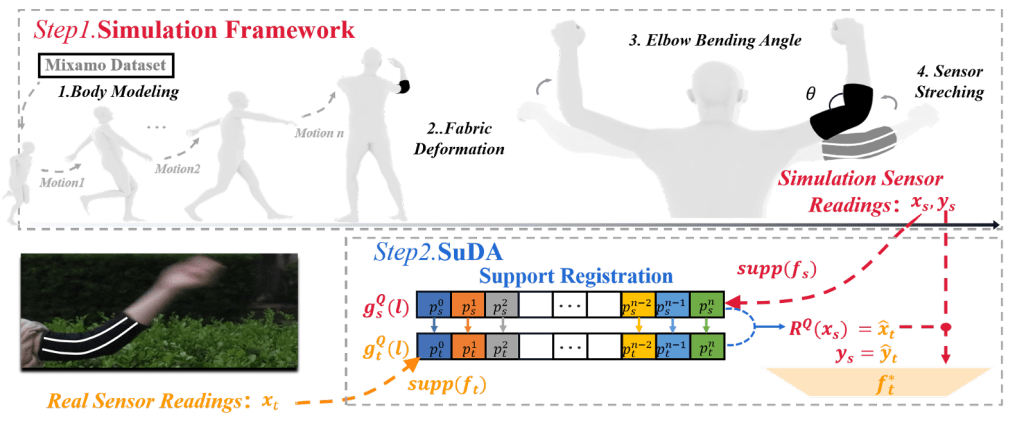
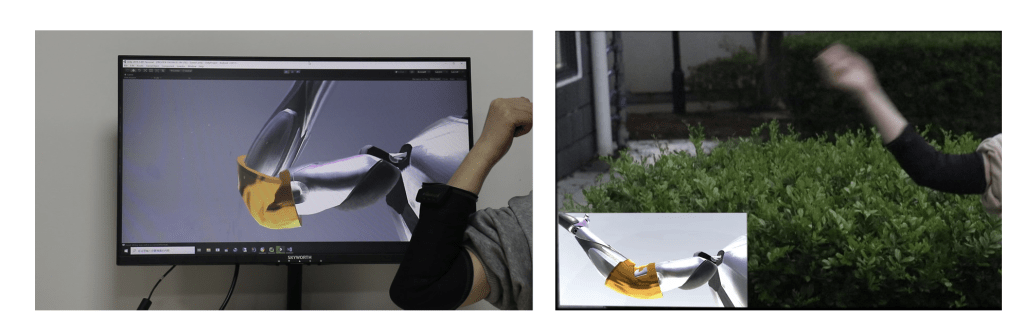
What if our clothes could capture our body motion accurately? This paper introduces Flexible Inertial Poser (FIP), a novel motion capturing system using daily garments with two elbow-attached flex sensors and four Inertial Measurement Units (IMUs). To address the inevitable sensor displacements in loose wearables which degrade joint tracking accuracy significantly, we identify the distinct characteristics of the flex and inertial sensor displacements and develop a Displacement Latent Diffusion Model and a Physics informed Calibrator to compensate for sensor displacements based on such observations, resulting in a substantial improvement in motion capture accuracy.