





Category: question1
-
FUNGI: A Foundation Model for Generalist Garment-based Inertial Motion Capture
FUNGI: A Foundation Model for Generalist Garment-based Inertial Motion Capture How to learn a universal foundation model which could adapt to different users, motions, and garment designs? Current models generalize poorly across different fabric types, IMU placements, and sensor counts, leaving a significant accuracy gap compared to tight-fitting garments. Consequently, every new clothing…
-
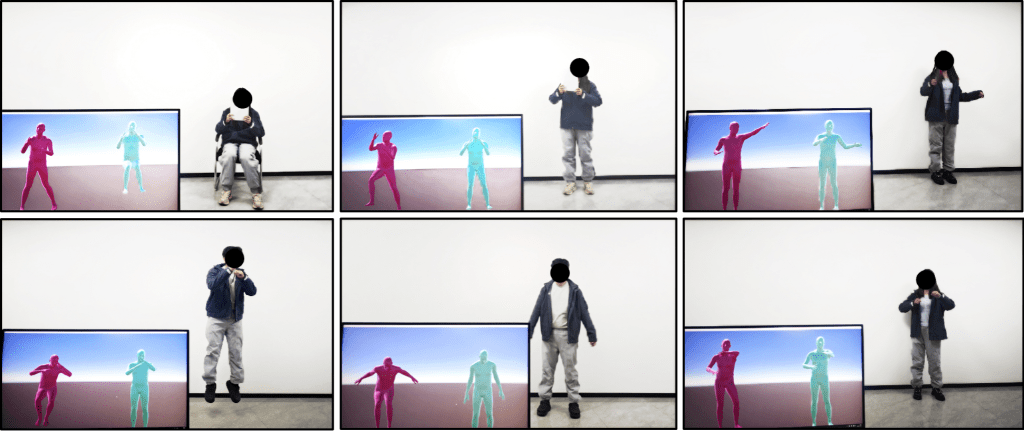
Garment Inertial Denoiser (GID)
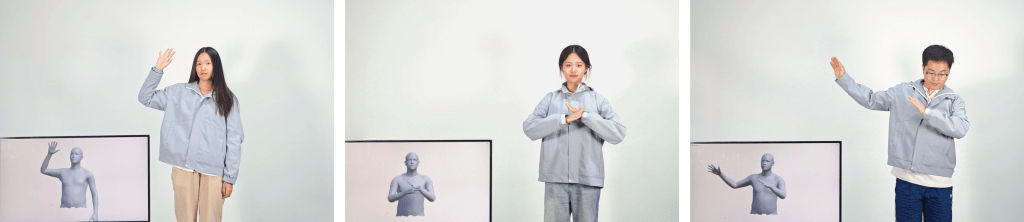
Full Body Motion Capture with Daily Wearing Garment
-
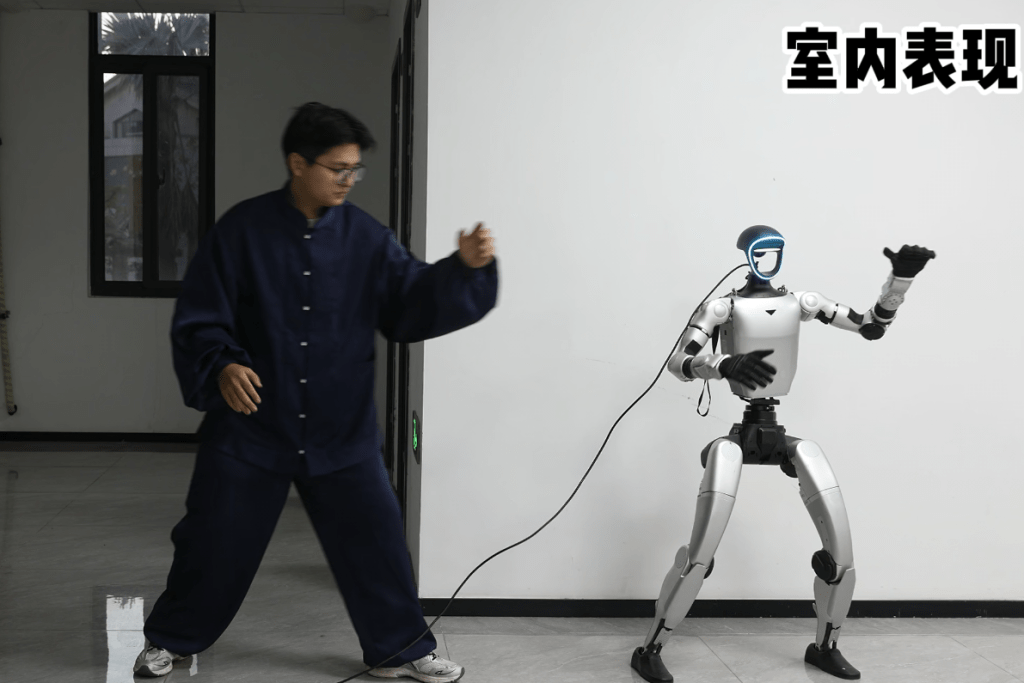
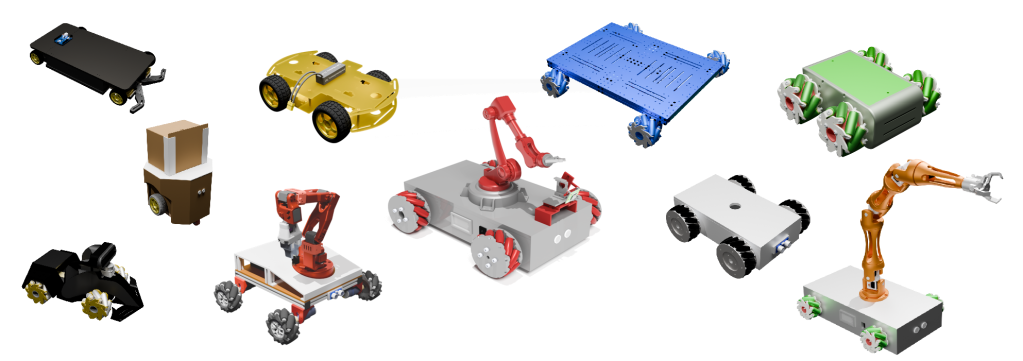
Garment-based Humanoid Control
Control robots with our daily wearing garment
-
Wear-It-Free
yes it is
-
Self-Adaptive-Motion-Tracking (SAMT)
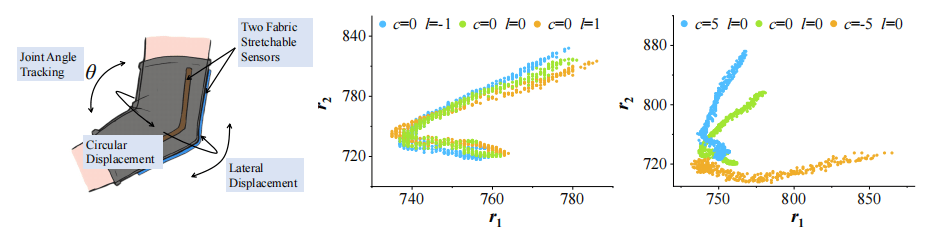
Self-Adaptive Motion Tracking Against On-body Displacement of Flexible Sensors
-
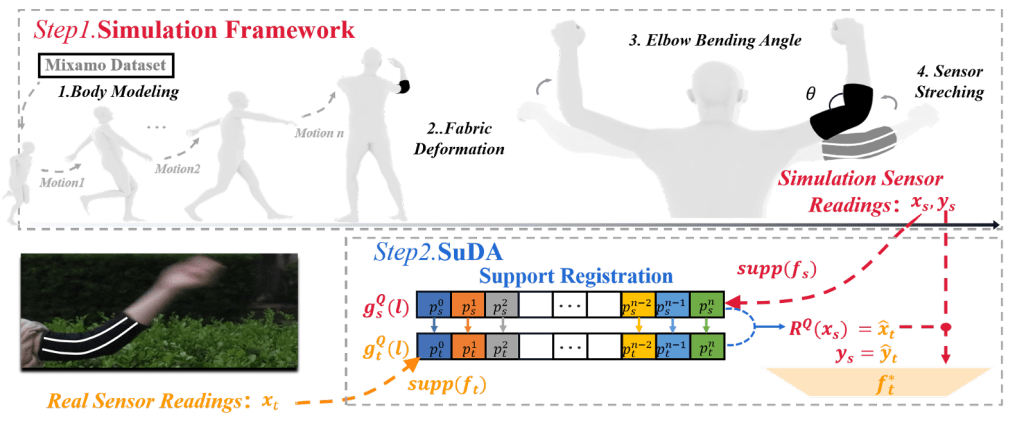
Support-based Domain Adaptation
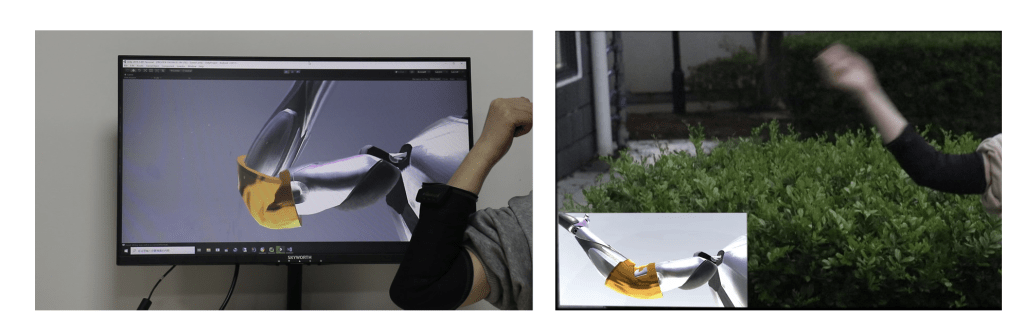
Support-based Domain Adaptation for Sim2Real Hinge Joint Tracking with Flexible Sensors
-
Flex Inertia Poser (FIP)
What if our clothes could capture our body motion accurately?
-
DisPad
Flexible On-Body Displacement of Fabric Sensors for Robust Joint-Motion Tracking
