Tag: ICML2024
-
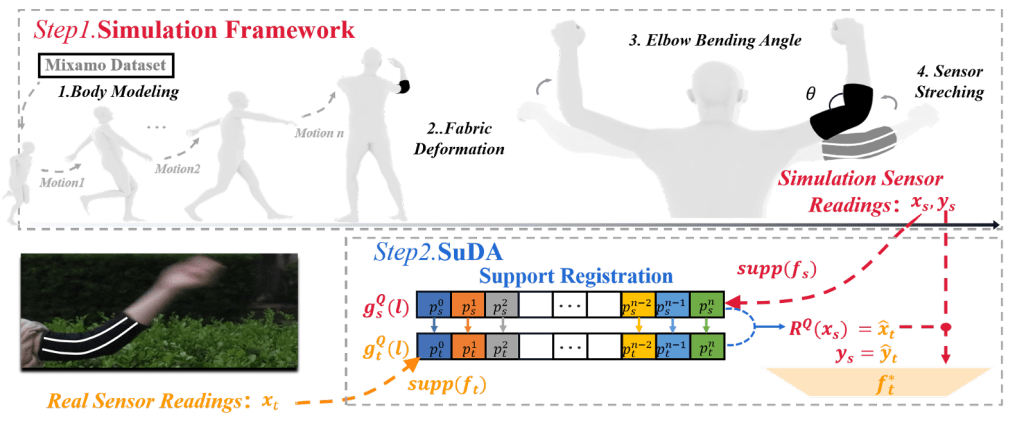
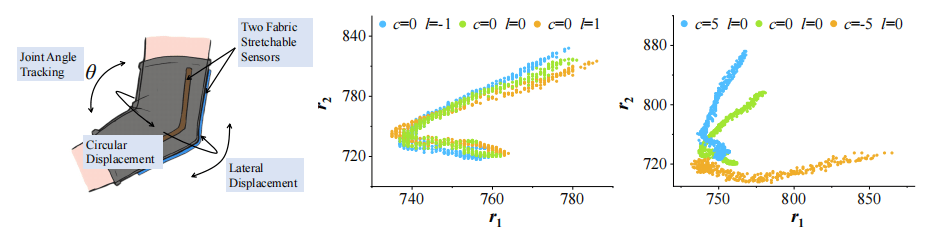
Support-based Domain Adaptation
Support-based Domain Adaptation for Sim2Real Hinge Joint Tracking with Flexible Sensors
My name is Jiawei Fang (方家卫).
My vision is to build a close-loop emboided system—one in which machines continuously sense, interpret, generate, and refine their interactions with the physical world. To make such a closed-loop system possible, my research is driven by two tightly coupled questions: (1) How can machines perceive and reason about physical intelligence from real-world sensory interaction in an accurate and imperceptible way? (2) How can such physically grounded intelligence be further used to autonomously design and evolve embodied systems, including mechanical devices and robots?
I had my bachelor’s degree in Xiamen University. I am fortunate to work with Prof. Shihui Guo and Prof. Yipeng Qin for four years. Previously, I was a research intern at Carnegie Mellon University in the Computer Science Department and a visiting scholar at UC Berkeley in the Mechanical Engineering Department, mentored by Prof. Lining Yao and University of Washington, mentored by Prof. Yiyue Luo. I am now working at CSAIL, MIT, mentored by Prof. Wojciech Matusik.
If you are interested in any aspect of me, I am always open to discussions and collaborations. Feel free to reach out to me at jiaweif[at]stu.xmu.edu.cn

Massachusetts Institute of Technology
CDFG, CSAIL (2025.5 – present)
Research Assistant | Advisor: Prof. Wojciech Matusik

University of Washington, Seattle
Wearable Intelligence Lab, ECE (2024.7 – 2024.9)
Research Intern | Advisor: Prof. Yiyue Luo

University of California, Berkeley
Morphing Matter Lab, ME (2024.1 – 2025.5)
Visiting Scholar | Advisor: Prof. Lining Yao

Carnegie Mellon University
Morphing Matter Lab, HCII (2023.4 – 2024.5)
Research Intern | Advisor: Prof. Lining Yao

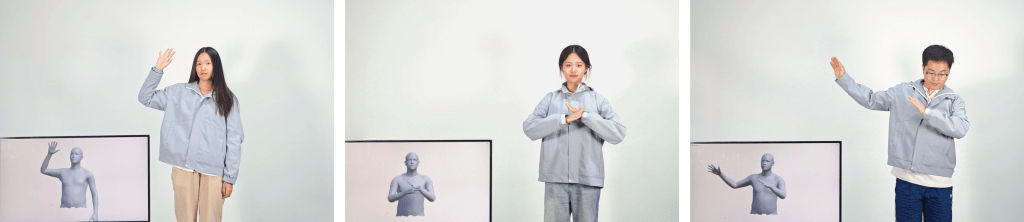
FUNGI: A Foundation Model for Generalist Garment-based Inertial Motion Capture How to learn a universal foundation model which could adapt to different users, motions, and garment designs? Current models generalize poorly across different fabric types, IMU placements, and sensor counts, leaving a significant accuracy gap compared to tight-fitting garments. Consequently, every new clothing…
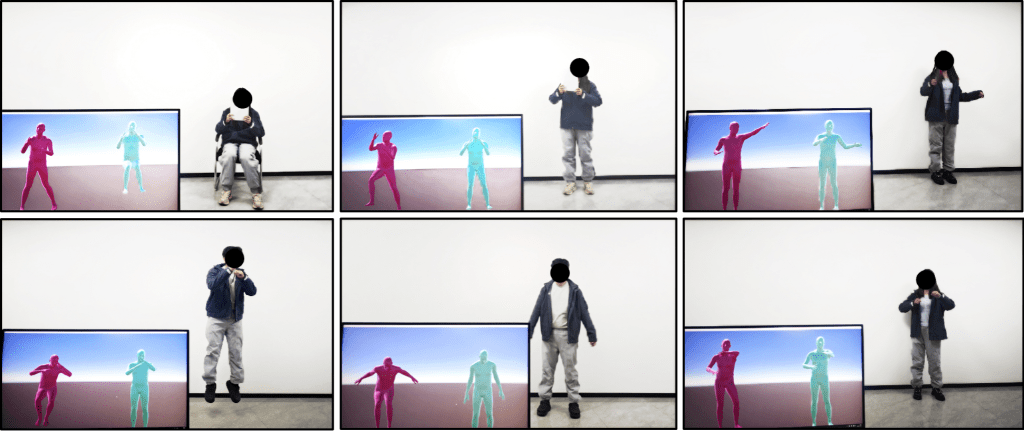
Self-Adaptive Motion Tracking Against On-body Displacement of Flexible Sensors
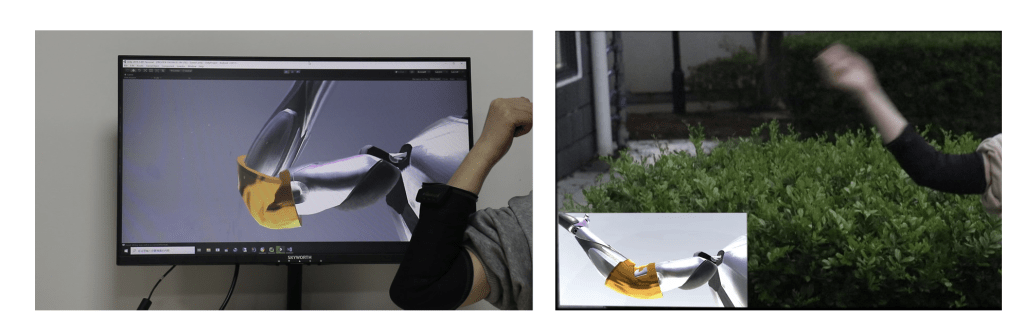
Support-based Domain Adaptation for Sim2Real Hinge Joint Tracking with Flexible Sensors
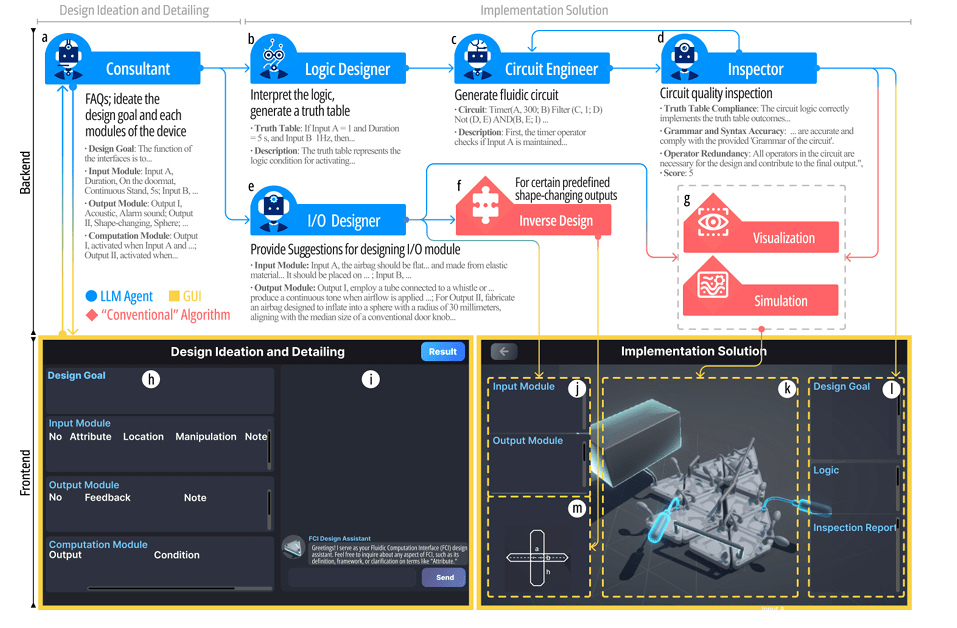
Enabling Generative Design Tools with LLM Agents for Mechanical Computation Devices: A Case Study

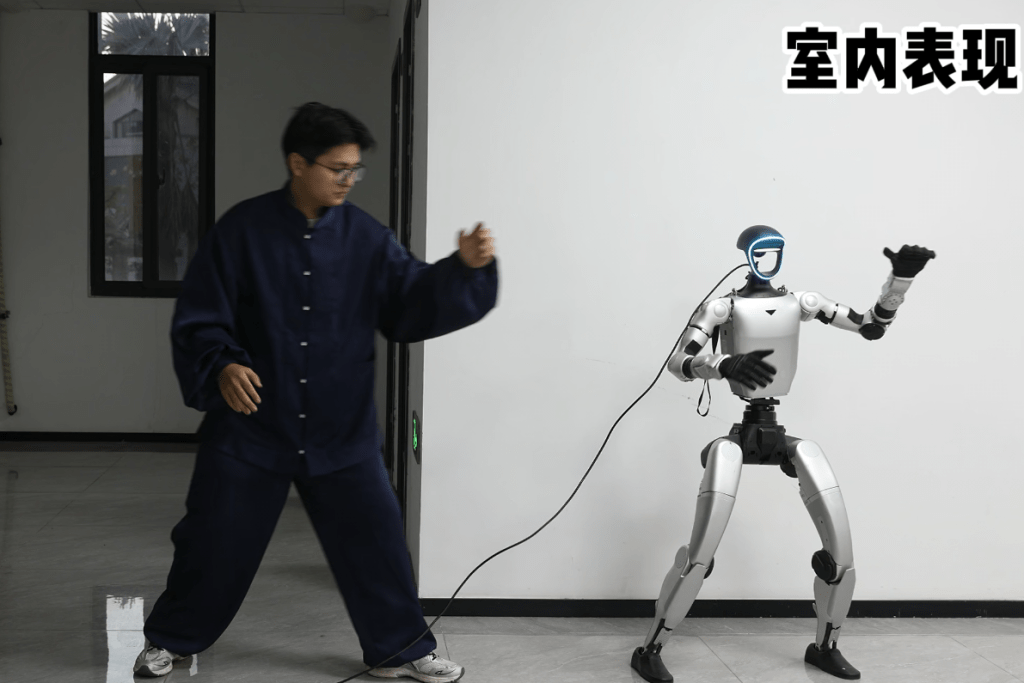
the first LLM-driven framework that integrates morphology and reward shaping for co-optimization within the robot design loop
Support-based Domain Adaptation for Sim2Real Hinge Joint Tracking with Flexible Sensors
